The Simple Harmonic Oscillator#
Most of the acoustic system we are interested in modeling are based on the simple harmonic oscillator. The simple harmonic oscillator is a model of a mass on a spring. The mass is attached to a spring and the other end of the spring is attached to a wall. The mass is free to move in one dimension. The mass is displaced from its equilibrium position by a distance \(x\) and released. We can describe the dynamics of the system using Newton’s second law of motion \(F = m \ddot{x}\):
where \(m\) is the mass of the object, \(k\) is the spring constant, \(x\) is the displacement of the mass from its equilibrium position, and \(\ddot{x}\) is the second derivative in time of the displacement of the mass. Note that we have assumed no external driving force on the system (i.e., the right hand side of the equation is zero).
The solution to this equation is a sinusoidal function of time:
where \(A\) is the amplitude of the oscillation, \(\omega=\sqrt{k/m}\) is the angular frequency of the oscillation, and \(\phi\) is the phase which depends on the initial conditions of the system (i.e. the initial displacement and velocity of the mass).
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
# Constants for the simple harmonic oscillator
m = 1.0 # mass (kg)
k = 1.0 # spring constant (N/m)
omega = np.sqrt(k/m) # angular frequency (rad/s)
A = 0.5 # amplitude (m)
phi = 0 # phase (rad)
# Time array (s)
t = np.linspace(0, 4*np.pi/omega, 500)
# Oscillation function (m)
x_t = A * np.cos(omega * t + phi) + 0.5
fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(8, 5))
# Setting up the subplot for animation of mass and spring
ax[0].set_xlim(-2, 2)
ax[0].set_ylim(-0.2, 1.2) # Adjust to range [0, 1]
ax[0].set_title("Undamped Harmonic Oscillator")
ax[0].set_yticks([]) # Remove y-axis ticks
ax[0].set_xticks([]) # Remove x-axis ticks
spring, = ax[0].plot([], [], lw=2)
mass = ax[0].scatter([0], [0.5], s=300) # Initialize at 0.5
# Setting up the subplot for the oscillation graph
ax[1].set_xlim(0, 4*np.pi/omega)
ax[1].set_ylim(0, 1)
ax[1].set_title("Oscillation vs. Time")
ax[1].set_xlabel("Time (s)")
ax[1].set_ylabel("Position (m)")
line, = ax[1].plot([], [], lw=2)
time_marker = ax[1].axvline(x=0, color='r', linestyle='--')
def init():
spring.set_data([], [])
mass.set_offsets([[0, 0]]) # Set as 2D structure
line.set_data([], [])
return spring, mass, line, time_marker
def animate(i):
# Animation of the mass and spring
spring.set_data([0, 0], [0, x_t[i]])
mass.set_offsets([[0, x_t[i]]]) # Set as 2D structure
# Oscillation graph
line.set_data(t[:i], x_t[:i])
time_marker.set_xdata(t[i])
return spring, mass, line, time_marker
anim = FuncAnimation(
fig,
animate,
frames=len(t),
init_func=init,
blit=True,
interval=25
)
plt.close(fig)
# Show the animation
display(HTML(anim.to_html5_video()))
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
Cell In[1], line 67
64 plt.close(fig)
66 # Show the animation
---> 67 display(HTML(anim.to_html5_video()))
File ~/.local/lib/python3.12/site-packages/matplotlib/animation.py:1306, in Animation.to_html5_video(self, embed_limit)
1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
-> 1306 self.save(str(path), writer=writer)
1307 # Now open and base64 encode.
1308 vid64 = base64.encodebytes(path.read_bytes())
File ~/.local/lib/python3.12/site-packages/matplotlib/animation.py:1122, in Animation.save(self, filename, writer, fps, dpi, codec, bitrate, extra_args, metadata, extra_anim, savefig_kwargs, progress_callback)
1119 for data in zip(*[a.new_saved_frame_seq() for a in all_anim]):
1120 for anim, d in zip(all_anim, data):
1121 # TODO: See if turning off blit is really necessary
-> 1122 anim._draw_next_frame(d, blit=False)
1123 if progress_callback is not None:
1124 progress_callback(frame_number, total_frames)
File ~/.local/lib/python3.12/site-packages/matplotlib/animation.py:1157, in Animation._draw_next_frame(self, framedata, blit)
1153 def _draw_next_frame(self, framedata, blit):
1154 # Breaks down the drawing of the next frame into steps of pre- and
1155 # post- draw, as well as the drawing of the frame itself.
1156 self._pre_draw(framedata, blit)
-> 1157 self._draw_frame(framedata)
1158 self._post_draw(framedata, blit)
File ~/.local/lib/python3.12/site-packages/matplotlib/animation.py:1789, in FuncAnimation._draw_frame(self, framedata)
1785 self._save_seq = self._save_seq[-self._save_count:]
1787 # Call the func with framedata and args. If blitting is desired,
1788 # func needs to return a sequence of any artists that were modified.
-> 1789 self._drawn_artists = self._func(framedata, *self._args)
1791 if self._blit:
1793 err = RuntimeError('The animation function must return a sequence '
1794 'of Artist objects.')
Cell In[1], line 52, in animate(i)
50 # Oscillation graph
51 line.set_data(t[:i], x_t[:i])
---> 52 time_marker.set_xdata(t[i])
53 return spring, mass, line, time_marker
File ~/.local/lib/python3.12/site-packages/matplotlib/lines.py:1304, in Line2D.set_xdata(self, x)
1291 """
1292 Set the data array for x.
1293
(...) 1301 set_ydata
1302 """
1303 if not np.iterable(x):
-> 1304 raise RuntimeError('x must be a sequence')
1305 self._xorig = copy.copy(x)
1306 self._invalidx = True
RuntimeError: x must be a sequence
As a State Space Model#
The simple harmonic oscillator can be represented as a state space model. The state space model is a set of first order differential equations that describe the dynamics of the system in terms of its state variables (i.e. the variables that describe the state of the system, such as position and velocity).
First we can rewrite the our original second order differential equation as a set of two first order differential equations:
where we introduce \(v\) as the velocity of the mass. We can write this as a matrix equation:
If we define the state vector \(\mathbf{x}= \begin{bmatrix} x \\ v \end{bmatrix}\) and the state matrix \(\mathbf{A} = \begin{bmatrix} 0 & 1 \\ -\frac{k}{m} & 0 \end{bmatrix}\), then we can write the equation as:
where \(\dot{\mathbf{x}} = \begin{bmatrix} \dot{x} \\ \dot{v} \end{bmatrix}\).
Usually we are interested in the output of the system, which is the position of the mass. For this we can add an additional matrix \(\mathbf{C} = \begin{bmatrix} 1 & 0 \end{bmatrix}\) which selects the first element of the state vector \(\mathbf{x}\).
To account for external driving forces, we can add a matrix \(\mathbf{B}\) which multiplies the input vector \(\mathbf{u}\). The input vector \(\mathbf{u}\) is a vector of external forces acting on the system. For the simple harmonic oscillator, the external force is proportional to the mass. Therefore, \(\mathbf{B} = \begin{bmatrix} 0 \\ \frac{1}{m} \end{bmatrix}\).
Our state space representation is now:
or
State space models are useful because they can be used to model any LTI system. As we will see later, we can also diagonalize the state space model to obtain efficient solutions to systems with thousands of state variables.
Finding the Dynamics of the System using Gradient Descent#
We can use Gradient Descent to find the dynamics of the system. For this, first we can create an oscillator with a know angular frequency \(\omega\):
import control as ctrl
import numpy as np
from matplotlib import pyplot as plt
import torch
# Set the seed for reproducibility
torch.random.manual_seed(3407)
# Define the system
k = 1560
m = 0.9
total_steps = 300
step = 1 / total_steps
A = np.array(
[
[0, 1],
[-k/m, 0]
]
)
C = np.array([[1.0, 0]])
B = np.array([[0], [1/m]])
D = np.array([[0]])
sys = ctrl.ss(
A,
B,
C,
D,
)
# Discretize the system
sys_d = sys.sample(Ts=step, method='bilinear')
A_d, B_d, C_d, D_d = sys_d.A, sys_d.B, sys_d.C, sys_d.D
mag, phase, omega = ctrl.bode(
sys,
dB=True,
Hz=True,
margins=False
)
def simulate_system(
A: torch.Tensor, # (2, 2)
B: torch.Tensor, # (2, 1)
C: torch.Tensor, # (1, 2)
u: torch.Tensor, # input (N, 1)
x0: torch.Tensor, # initial state (2,)
):
# state history (N+1, 2)
y = torch.zeros(u.shape[0])
x = x0
for i in range(u.shape[0]):
x = A @ x + B @ u[i]
y[i] = C @ x
return y
Use random intial conditions for the position and velocity of the oscillator, to generate a random trajectory in time.
random_x0 = torch.rand((2,))
u = torch.zeros((60, 1))
y = simulate_system(
torch.from_numpy(A_d).float(),
torch.from_numpy(B_d).float(),
torch.from_numpy(C_d).float(),
u,
random_x0
)
Optimize using Adam to find the spring constant and mass of the oscillator.
import torch.nn as nn
class StateSpaceModel(nn.Module):
def __init__(self):
super().__init__()
self.A = nn.Parameter(torch.rand((2, 2)))
self.B = nn.Parameter(torch.rand((2, 1)))
self.C = nn.Parameter(torch.rand((1, 2)))
def forward(self, u, x0):
return simulate_system(self.A, self.B, self.C, u, x0)
model = StateSpaceModel()
optimiser = torch.optim.Adam(model.parameters(), lr=6e-3)
epochs = 1000
for i in range(epochs):
optimiser.zero_grad()
y_hat = model(u, random_x0)
loss = torch.nn.functional.mse_loss(y_hat, y)
loss.backward()
optimiser.step()
print(f"Loss: {loss.item():.4f}") if i % 200 == 0 else None
Loss: 0.2351
Loss: 0.2283
Loss: 0.1367
Loss: 0.0000
Loss: 0.0000
# Calculate the eigenvalues of the discretized system matrix
eig_vals_d = np.linalg.eigvals(model.A.detach().numpy())
# Calculate the equivalent continuous-time eigenvalues using the logarithm
eig_vals = np.log(eig_vals_d) / step
# The imaginary part of the continuous-time eigenvalues corresponds to omega
omega_recovered = abs(eig_vals[0].imag)
print(f"Original omega: {np.sqrt(k/m)}")
print(f"Recovered omega: {omega_recovered}")
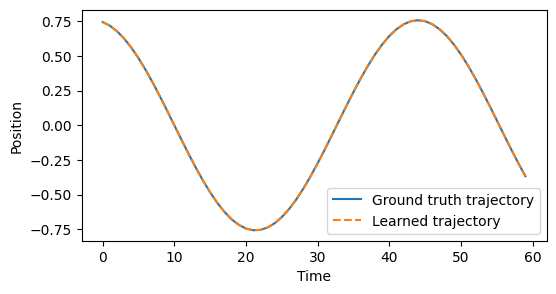
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(y, label='Ground truth trajectory')
ax.plot(y_hat.detach().numpy(), label='Learned trajectory', linestyle='--')
ax.legend()
ax.set_xlabel('Time')
ax.set_ylabel('Position')
Original omega: 41.63331998932265
Recovered omega: 41.566688537597656
Text(0, 0.5, 'Position')
As a transfer function#
Finding the dynamics of the system using gradient descent in the previous form is not very efficient. A state space model is equivalent to a single layer recurrent network, and therefore it suffers from the same gradient vanishing and exploding problems.
Instead, we can use the transfer function representation of the system. The transfer function is the ratio of the output of the system to the input of the system in the frequency domain. For the simple harmonic oscillator, the transfer function is:
The transfer function of a physical system is useful because we can sample its response to an input signal in the frequency domain.
s = ctrl.TransferFunction.s
tf = 1 / (m * s**2 + k)
display(tf)
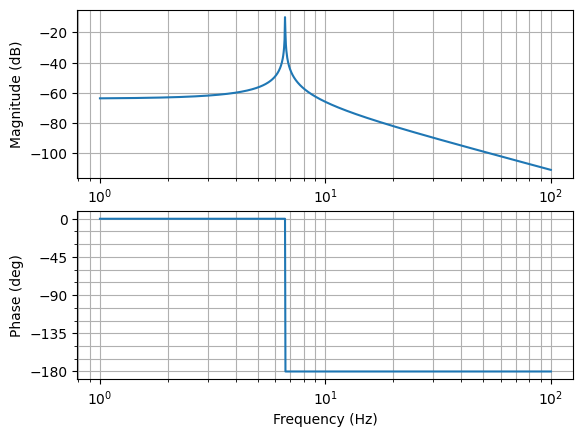
We can model the simple harmonic oscillator as a trasfer function with two-poles (i.e. two complex conjugate poles). The poles of the transfer function are the roots of the denominator of the transfer function.
Sampling the frequency response of the system is done by evaluating the denominator at different frequencies. For our simple harmonic oscillator, the frequency response is:
# sample the poles in the frequency domain
omega = torch.linspace(0, 1000, 1000)
mag, phase, omega = ctrl.freqresp(tf, omega)
class TransferFunctionModel(nn.Module):
def __init__(self):
super().__init__()
self.pole = nn.Parameter(
torch.view_as_real(
torch.rand((1,), dtype=torch.cfloat)
)
)
def forward(
self,
omega
):
s = 1j * omega
poles = torch.concatenate([
torch.view_as_complex(self.pole),
torch.view_as_complex(self.pole).conj()
])[...,None]
# calculate the transfer function
sampled = (s - poles).prod(dim=0)
return 1.0 / sampled
Optimisation using the frequency response of the system#
model = TransferFunctionModel()
optimiser = torch.optim.Adam(model.parameters(), lr=8e-3)
epochs = 5_000
target_magnitude = torch.from_numpy(mag).float()
target_phase = torch.from_numpy(phase).float()
sample_omega = torch.from_numpy(omega).float()
for i in range(epochs):
optimiser.zero_grad()
opt_freq_response = model(sample_omega)
opt_magnitude = opt_freq_response.abs()
loss = torch.nn.functional.l1_loss(torch.log(opt_magnitude), torch.log(target_magnitude))
loss.backward()
optimiser.step()
print(f"Loss: {loss.item():.4f}") if i % 1000 == 0 else None
Loss: 0.2460
Loss: 0.2189
Loss: 0.1888
Loss: 0.1592
Loss: 0.1130
fig, ax = plt.subplots(2, 1, figsize=(6, 6))
fig.suptitle("Optimised response")
ax[0].set_title("Magnitude")
ax[0].plot(mag, label="Original")
ax[0].plot(opt_freq_response.abs().detach().numpy(), '--', label="Optimised")
ax[1].set_title("Phase")
ax[1].plot(phase, label="Original")
ax[1].plot(opt_freq_response.angle().detach().numpy(), '--', label="Optimised")
([a.legend() for a in ax])
fig.tight_layout()
plt.show()
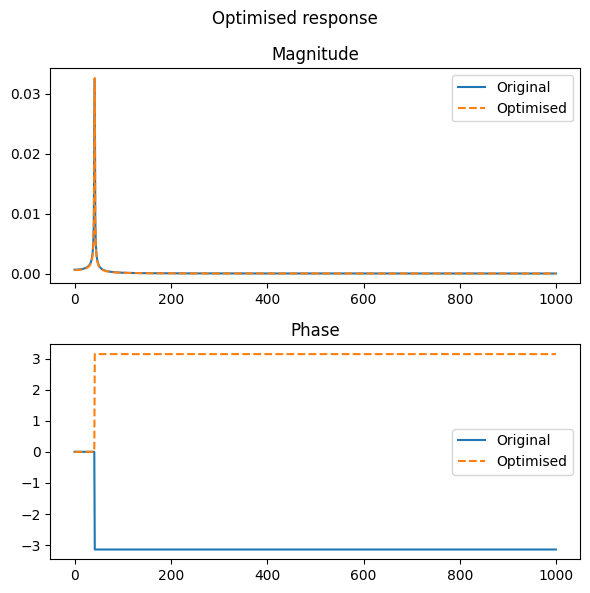
print(f"Optimized Omega: {torch.view_as_complex(model.pole).imag.detach().numpy()[0]}")
print(f"Original omega: {np.sqrt(k/m)}")
Optimized Omega: 41.675804138183594
Original omega: 41.63331998932265
Conclusion#
We have seen two different ways in which we can model and optimize the dynamics of a system. The first method is to use a state space model, which is equivalent to a single layer recurrent network. The second method is to use the transfer function of the system. The transfer function is more efficient to optimize and can be used to reduce the number of modes of the system, as we will see in the next section.